Öngörülmüş Gerçeklik: Geleceği Tahmin Etmek


Otomasyon sistemlerinin kullanım alanlarının artmasıyla birlikte, insanların ve robotların aynı ortamda, beraber çalışmasını gerektiren durumlar meydana gelmiştir. Çalışma ortamında alınabilecek önlemlerle azaltılması mümkün olsa da, çarpışma ya da kaza gibi istenmeyen durumlar meydana gelmektedir. Dolayısıyla, insanlar ve robotlar ortak çalışma ortamında hareket ederken, çarpışmaların ve kazaların önlenmesi oldukça önemlidir. Robot bilimciler, çarpışma ve kaza risklerinin azaltılması için birçok teknik geliştirdiler. Bu tekniklerden bazılarını içeren öngörülmüş gerçeklik, yakın gelecekte meydana gelebilecek olayları tahmin edebilen bir kaza önleme sistemidir.
Günümüzde Kaza Önleme Sistemleri
Günümüz robotları, ortamdaki değişimleri algılayan sensörlere sahiptir. Geliştirilen teknikler sayesinde, sensörlerden alınan ham bilgiler, gelişmiş algoritmalar ve karar verme sistemleri kullanılarak işlenir. Bu işlemler sayesinde bir robot, çevresindeki insanların hareketlerini öngörür ve çarpışmayı engelleyecek şekilde hareket eder.
Öngörülmüş Gerçeklik Nedir?
Günümüz sistemlerinin bazı dezavantajları bulunmaktadır. Çünkü, insanların hareketlerini ve genel olarak insan davranışını öngörmek oldukça zordur. Öte yandan, robotlar genellikle belirli işlemleri gerçekleştirmek veya belirli bir rotayı takip etmek için programlandığından, robot hareketlerini öngörmek daha kolaydır. Dolayısıyla insanlar, robotların hareketlerini ve bu hareketlerin çevre üzerindeki etkilerini öngörebilirse, kazalara ve çarpışmalara karşı önlem alabilirler. Bu mantık kullanılarak, Japonya’da bulunan Kyushu Üniversitesi araştırmacıları, öngörülmüş gerçeklik olarak adlandırılan bir sistem geliştirildi. Sistem, yakın gelecekte meydana gelebilecek olayların tahmin edilmesine olanak sağlamaktadır.
Öngörülmüş Gerçeklik Sistemi Nasıl Çalışır?
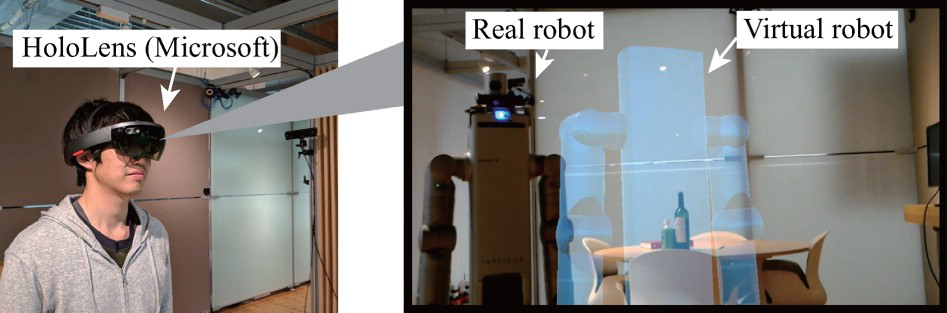
Sistem temel olarak, çevreden veri toplama ve toplanan verileri işleme üzerine oluşturulmuştur. Sistem, aynı ortamda bulunan insanların, robotların, mobilyaların ve diğer nesnelerin konum bilgilerini içeren bir veri seti derler. Derlenen veri seti kullanılarak, yakın gelecekte gerçekleşebilecek olayların simülasyonları oluşturulur. Oluşturulan simülasyonlar sanal görüntülere dönüştürülür ve sanal gerçeklik (VR) başlığı ya da artırılmış gerçeklik (AR) ekranı aracılığıyla insan kullanıcılara sunulur. Bu işlemler sonrasında insan kullanıcının başlığında, ortamda bulunan robotla aynı boyutta bir sanal robot belirir. Sanal robot, gerçek robotun gerçekleştireceği işlemleri sanal olarak gerçekleştirir. Bu sayede insan kullanıcı, gerçek robotun hareket edeceği konumu ve gerçekleştireceği işlemleri birkaç saniye öncesinden görmüş olur.
Öngörülmüş Gerçeklik Sisteminin Ekipmanları
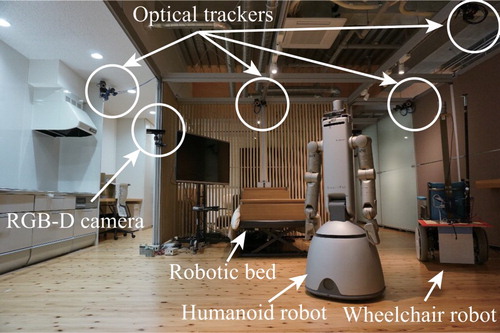
Ortamda bulunan farklı nesnelerin, robotların ve insanların konumlarını belirlemek için, RGB-D kamera dahil olmak üzere birçok sensör kullanılması gerekmektedir. Kullanılan sensörler, ortamın büyüklüğüne ve ortamdaki değişkenlere göre stratejik şekilde yerleştirilmelidir. Yerleştirilen optik sensörler robotları ve diğer cansız nesneleri izlerken, RGB-D kamera çoğunlukla insan hareketlerini takip etmektedir.
Öngörme işlemi ise yazılımsal olarak gerçekleştirilmektedir. Sensörlerden ve RGB-D kameradan elde edilen veriler, hareket planlayıcısına ve dinamik simülatöre iletilir. İki yazılımsal sistem bileşeni birlikte çalışarak, yakın gelecekte meydana gelmesi muhtemel olayların sanal görüntülerini oluşturma işlemini gerçekleştirir.
İnsan kullanıcılar, sanal görüntüleri VR başlığı veya AR ekranı aracılığıyla takip edebilirler. Sanal görüntüler, değişikliklerin net şekilde görülebilmesi için, insan kullanıcının bulunduğu konuma ve bakış açısına göre hazırlanmaktadır.
Öngörülmüş Gerçeklik Sisteminin Versiyonları
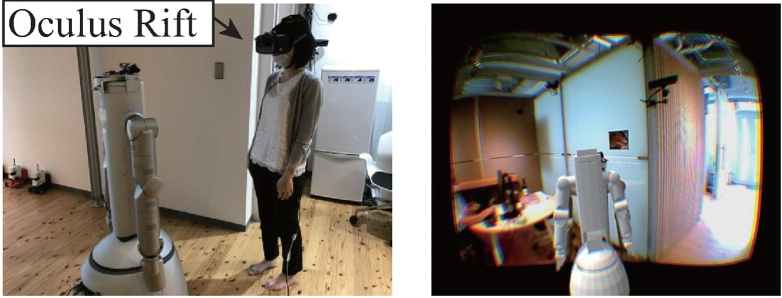
Öngörülmüş gerçeklik, versiyon 1.0 ve versiyon 2.0 olmak üzere iki farklı şekilde denenmektedir. Versiyon 1.0 dizaynında sanal gerçeklik teknolojisi kullanılırken, versiyon 2.0 dizaynında artırılmış gerçeklik teknolojisi kullanılmaktadır. Sanal gerçeklik teknolojisinin daha karmaşık ve pahalı bileşenlerden oluşması, sistemin gerçek hayatta kullanılmasının pek mümkün olmaması versiyon 1.0’ın dezavantajları arasındadır.
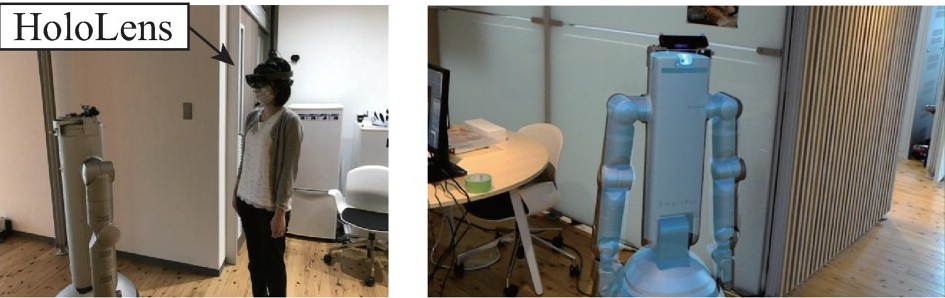
Öte yandan, artırılmış gerçeklik teknolojisi kullanan versiyon 2.0 daha basit yapıdadır. Ancak versiyon 2.0’da kusursuz değildir. Versiyon 2.0, daha net görüntü ve düşük gecikme sunmasına rağmen, insan kullanıcının görüş açısı oldukça dardır.
Öngörülmüş Gerçekliğin Geleceği
Öngörülmüş gerçeklik, geleneksel çarpışma önleme teknolojileri ile birlikte kullanılabilir. Bu alanda yapılacak gelişmelerle birlikte alternatif bir çarpışma önleme teknolojisi olarak da kullanılması mümkündür. Gelecekte bu sistem, özellikle iç mekanlarda insanlar ve robotlar arasındaki etkileşimlerin güvenliğini artırmak için kullanılabilir. Sistem şu an için birçok bileşenden oluşmakta ve sadece sınırlı bir bölge için düzgün şekilde çalışmaktadır. Sistemin sadece programlanmış robotlarla birlikte çalışması da bir sorundur. Çünkü ilerleyen yıllarda yapay zekaya sahip robotların kullanılması mümkün olabilir. Sistemin, kendi kararlarını verebilen robotlarla birlikte çalışması pek mümkün gözükmemektedir. Sistemi geliştiren araştırmacıların bir sonraki hedefi, algılama sistemlerini basitleştirirken, sistemin esnekliğini artırmaktır. İlerleyen aşamalarda ise sistemin akıllı telefon gibi hafif ve taşınabilir cihazlarda hayata geçirilmesi planlanmaktadır.



