Hareket Kontrol Sistemleri Nedir? Nasıl Çalışır?


Üretim sektöründe rekabet günden güne artmaktadır. Artan bu rekabet ortamında teknolojik gelişmeleri takip etmek ve yeni teknolojileri üretim bantlarına entegre etmek oldukça önemlidir. Hareket kontrol sistemleri, bu teknolojilerin başında gelir. Hareket kontrol sistemlerinin etkin biçimde kullanılması ile; üretim bantlarındaki insan faktörünün azalması, birim başına maliyetlerin düşmesi ve üretim hızının artması mümkündür.
Hareket Kontrol Sistemleri Nedir?
Hareket kontrol sistemleri, otomasyon sistemlerinin bir alt dalı olarak tanımlanabilir. Yüksek kesinlikte hız, konum ve tork kontrolü sağlayan, döner veya lineer hareket üreten sistemler, hareket kontrol sistemleri olarak isimlendirilir. Hareket kontrol sistemleri, açık çevrim ve kapalı çevrim olmak üzere ikiye ayrılmaktadır.
Açık Çevrim Hareket Kontrol Sistemleri
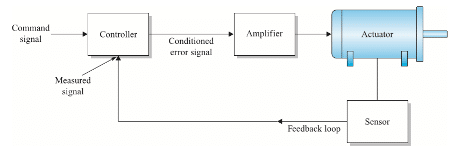
Açık çevrim hareket kontrol sistemleri, üç temel bileşenden oluşmaktadır. Bu temel bileşenler şunlardır:
- Kontrolör
- Yükseltici (Sürücü)
- Çalıştırıcı (Motor)
Açık çevrim hareket kontrol sistemlerinde işlemler, komut sinyali aracılığıyla gerçekleştirilir. Komut sinyali, hız, konum ve tork gibi parametreleri içermektedir. Bu sinyal, kontrolör tarafından dönüştürülür ve yükselticiye iletilir. Yükseltici ise, bu komut sinyalini motorun çalışma aralığına yükseltir. Bu işlemler sonucunda, çalıştırıcının hız, konum ve tork kontrolü istenilen şekilde gerçekleştirilir.
Ancak, açık çevrim hareket kontrol sistemlerinin bir kusuru bulunmaktadır. Sistemde bir geri besleme elemanı bulunmadığından, çalıştırıcıdan (motor) geri besleme sinyali alınamaz. Bu nedenle, sistemde bir hata meydana gelmesi ya da motor milindeki yükte bir değişiklik olması durumunda, kontrolör geri besleme sinyali alamadığından, hatanın düzeltilmesi mümkün olmayacaktır.

Kapalı Çevrim Hareket Kontrol Sistemleri
Açık çevrim ve kapalı çevrim arasındaki tek fark, kapalı çevrim hareket kontrol sistemlerinde geri besleme elemanının bulunmasıdır. Bunun dışındaki bileşenler aynıdır. Sistemde bir hata oluşması durumunda geri besleme elemanı, kontrolöre hata sinyali gönderir. Kontrolör bu hata sinyalini düzeltir ve sistem istenilen şekilde çalışmaya devam eder. Kapalı çevrim hareket kontrol sistemlerinin meydana gelebilecek hatalara karşı daha güvenli ve esnek olması sebebiyle, endüstrideki hareket kontrol sistemlerinin büyük çoğunluğu kapalı çevrim olarak dizayn edilir. Kapalı çevrim hareket kontrol sistemleri kısaca, servo sistemler olarak adlandırılır.
Hareket Kontrol Sistemlerinin Bileşenleri
Kontrolör
Kontrolör, kısaca hareket kontrol sistemlerinin beynidir. Sistemin parametrelerini içeren komut sinyali, kontrolör tarafından ± 10 Volt arasında bir gerilim değerine dönüştürülür. Hata durumunda oluşacak hata sinyalinin düzeltilmesi de kontrolör tarafından gerçekleştirilir. Kontrolör, motor milindeki yükün durumuna göre farklı hareket profilleri kullanabilir.
En çok kullanılan hareket profilleri aşağıdaki gibi sıralanabilir:
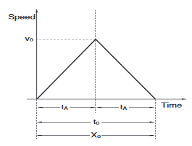
- Üçgen Hareket Profili: Kısa mesafeli, yüksek hızlı uygulamalar için uygundur.
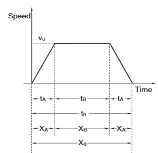
- Trapez Hareket Profili: Sistem belirli bir ivmeyle hızlanır. İstenilen hız değerine ulaşılınca sabit hızda devam eder. Sonrasında yine aynı ivme ile yavaşlar ve durur.
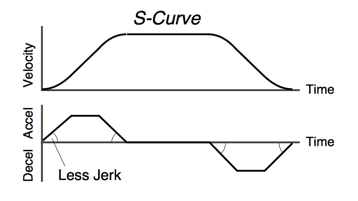
- S-Rampa Hareket Profili: Trapez hız profiline benzerlik gösterir ancak kırılma noktaları yumuşatılmıştır. Yüksek ataletli yükler için kullanılır.
Yükseltici (Sürücü)
Hareket kontrol sistemlerinde, kontrolör ile çalıştırıcı arasında bulunan elektronik güç elemanıdır. Kontrolörün dönüştürdüğü sinyalin, ± 10 Volt arasında bir gerilim değeri olduğundan bahsedilmişti. Ancak, bu gerilim değeriyle motorun istenilen şekilde çalışması mümkün değildir. Sürücü bu gerilim değerini, motorun çalışması için gerekli olan gerilim ve akım değerine yükseltir. Bu sayede motor istenilen şekilde kontrol edilebilir.
Çalıştırıcı (Motor)
Hareket kontrol sistemlerinde ani duruş ve kalkış, yüksek kesinlikte hız ve konum kontrolü gibi uygulamalar sıklıkla kullanılır. Bu nedenle hareket kontrol sistemlerinde kullanılacak motorlar, bu gereksinimleri yerine getirebilecek şekilde dizayn edilmelidir. Geleneksel AC ve DC motorlar bu gereksinimleri sağlayamaz. Bu nedenle hareket kontrol sistemlerinde çoğunlukla servo motorlar kullanılır.
Servo Motorlar
Ani duruş ve kalkış gibi uygulamaların yerine getirilebilmesi için, motorun atalet momentinin oldukça küçük olması gerekmektedir. Atalet momenti, rotor çapının kuvvetine bağlı olarak değiştiğinden, servo motorlar rotor çapları küçük olacak şekilde imal edilir. Bu fark servo motorları, görünüş olarak diğer motorlardan ayırmaktadır. Geleneksel motorlar, rotor çapları büyük, rotor boyları kısa olacak şekilde üretilir. Servo motorlar ise, rotor çapları küçük, rotor boyları uzun olacak şekilde üretilir. Servo motorlar sadece kapalı çevrim hareket kontrol sistemlerinde kullanılır.

Servo Motorların Avantajları
- Büyüklüğüne ve ağırlığına oranla daha yüksek çıkış gücü sağlar.
- Kısa süreler için daha yüksek moment sağlar.
- Geri besleme elemanları sayesinde yüksek kesinlik ve kontrol sağlar.
- Yüksek hızlarda geleneksel motorlara göre daha sessiz ve titreşimsiz çalışır.
Servo Motorların Dezavantajları
- Kontrolör ve geri besleme elemanları nedeniyle daha karmaşık bir yapıya sahiptir.
- Servo sistemlerin yatırım maliyeti geleneksel sistemlere göre daha yüksektir.
- Motor soğutması geleneksel motorlara göre daha zayıftır.
Geri Besleme Elemanları
Geri besleme elemanları hareket kontrol sistemlerinin hızını ölçmek, motor milinin ve yükün konumunu belirmek için kullanılır. Geri besleme elemanları analog ve dijital olarak iki kategoride incelenebilir.
Hareket Kontrol Sistemleri Nasıl Çalışır?
Açık çevrim ve kapalı çevrim hareket kontrol sistemlerinin daha iyi anlaşılması için, iki sistemi de örneklerle inceleyelim.
Tut ve Yerleştir Uygulaması

Yukarıdaki şekilde görülen step (adım) motor, tut ve yerleştir işlemini gerçekleştirecektir. Komut sinyaline göre sırasıyla A, B ve C kutularına parçalar yerleştirilecektir. Kontrolör bu komut sinyalini, ± 10 Volt arasında bir gerilim değerine dönüştürür. Bu gerilim değeri sürücü tarafından yükseltilir. Step motor periyodik olarak tut ve yerleştir işlemini yapmaya başlar. Ancak, geri besleme elemanı bulunmadığından bu sistem, bir açık çevrim hareket kontrol sistemi uygulamasıdır. Normal şartlarda sistem sorunsuz bir şekilde çalışacaktır. Fakat, yerleştirme işi sırasında bir sıkışma ya da beklenmeyen bir durum yaşanırsa, hata sinyali gönderilemeyeceğinden kontrolör bunun farkına varamayacaktır.
Uçan Testere Uygulaması
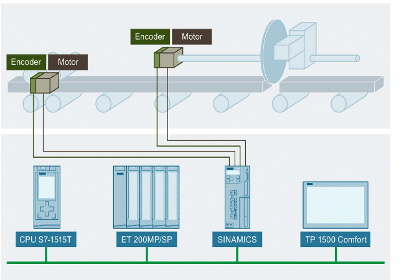
Yukarıdaki şekilde bir uçan testere uygulamasına ait şema görülmektedir. Uçan testere uygulamasında bantta ilerlemekte olan ürün, hareketli döner testere ya da bıçak tarafından kesilir. Kesilen her ürünün eşit parçada olması gereklidir. Bu nedenle ürün bandının hızı ile hareketli döner testerenin aynı hızda olması, yani senkronize olarak hareket etmesi gerekmektedir. Ürün bandı ve testere senkronize olarak hareket ediyor ise, testere ürünü 90 derecelik bir açıyla kesecektir.
Bu senkronizasyonun gerçekleşmesi için, kontrolörden (CPU S7-1515T) her iki motora da aynı aynı sinyal gönderilir. Sürücü (SINAMICS), gelen sinyali yükseltir ve iki motoru da sürme işlevini üstlenir. Motorların uçlarında bulunan enkoderler ise, motorların konum ve hız bilgisini anlık olarak kontrolöre iletir. Motorlar senkronize ise, bant üzerindeki ürünler eşit parçalar halinde kesilir. Eğer iki motor senkronize şekilde çalışmıyorsa, kontrolör oluşan hata sinyalini düzelterek sistemin istenen şekilde çalışmasını sağlar. Sistemde geri besleme elemanlarının bulunması nedeniyle uçan testere uygulaması, bir kapalı çevrim hareket kontrol sistemi uygulamasıdır.



