Owl Termal Görüntüleme Sistemi Nedir?

Otonom araçlarda görüntüleme işlemi için farklı sistemlerin kullanılması planlanmaktadır. Örnek olarak; stereo kameralar, LiDAR ve RADAR sistemleri gösterilebilir. Bununla birlikte, üç sistemin de bazı dezavantajları bulunmaktadır. Owl girişimi ise bu dezavantajları ortadan kaldırabilecek bir termal görüntüleme sistemi üzerine çalışmaktadır. Bu yazımızda, Owl termal görüntüleme sistemini inceledik.
Otonom Araçlarda Görüntüleme Sistemleri
Otonom araçların sürüş testleri genellikle güneşli ve sıcak bölgelerde gerçekleştirilmektedir. Güneşli ve sıcak bölgelerde gerçekleştirilen testler, otonom araçların görüntüleme kabiliyetlerini tam olarak sınayamamaktadır. Öte yandan; karlı, sisli veya düşük ışıklı ortamlarda test yapan geliştirici sayısı oldukça azdır. Bu durumun en temel nedeni ise otonom araçlarda kullanılan görüntüleme sistemleridir.
Halihazırda geliştirilmekte olan otonom araçların çoğunda, 2 boyutlu görüntüleme imkanı sunan stereo kameralar kullanılmaktadır. Stereo kamera, mesafe ölçümünde sıklıkla kullanılan, birden fazla lense sahip olan kameradır. Ancak stereo kamera sadece görünür ışığı algılayabilmektedir. Dolayısıyla stereo kameranın performansı ortamdaki ışık miktarına göre değişmektedir. Stereo kameralar sürekli olarak geliştirilmektedir. Buna rağmen sadece görünür ışığı algılayabilen optik sistemler, düşük ışıklı ya da karanlık ortamlarda verimli çalışmamaktadır.
Otonom araçlarda, stereo kameralara yardımcı olarak LiDAR ve RADAR sistemlerinin kullanılması planlanmaktadır. LiDAR, ortam ışığından bağımsız şekilde çalışabilen ancak oldukça maliyetli bir sistemdir. Dolayısıyla LiDAR sistemin kısa vadede otonom araçlarda kullanılması mümkün gözükmemektedir. RADAR gibi ses tabanlı sistemler ise çözünürlük probleminden dolayı genellikle yakın mesafe algılama işlemleri için kullanılmaktadır.
Bu doğrultuda çalışan mühendisler, düşük ışıklı veya karanlık ortamlarda görüntüleme yapabilecek termal tabanlı bir sistem geliştirdiler.
Owl Nedir?
Owl, otomotiv sektörü için termal görüntüleme sistemleri üreten bir girişimdir. Yakın zamanda hayata geçen Owl girişimi 15 mühendisten oluşmaktadır. Bu mühendislerden birkaçı daha öncesinde Kodak firmasında dijital fotoğrafçılığın geliştirilmesi üzerine çalışmıştır.
Owl Termal Görüntüleme Sistemi
Owl tarafından geliştirilen termal görüntüleme sistemi, bütün nesnelerin ısı enerjisi yayması prensibine dayanmaktadır. Bu prensibin doğruladığı gibi her nesne, boyutuna ve yapısına bağlı olarak değişen bir ısı enerjisi yaymaktadır. Dolayısıyla her nesnenin bir termal imzası bulunmaktadır. Owl termal görüntüleme sistemi, bu özellikten yararlanarak nesneleri algılayabilmektedir. Sistemde bulunan yapay zeka yazılımı ise nesnelerin ayırt edilmesini ve mesafelerin doğru şekilde ölçülmesini sağlamaktadır.
Owl tarafından yapılan açıklamaya göre, termal görüntüleme sistemi halihazırda kullanılan sistemlerle karşılaştırıldığında bazı avantajlara sahiptir. Örneğin; sadece görünür ışığı algılayabilen stereo kameralar Güneş’ten, sokak lambalarından veya farlardan yayılan ışığa bağlı olarak çalışmaktadır. LiDAR’lar ise uçuş süresi prensibine göre çalışmaktadır. Öte yandan RADAR’lar, nesnelere radyo sinyalleri gönderip, yansıyan sinyalleri işleyerek çalışmaktadır. Üç görüntüleme sistemi de aktif ışık / enerji kaynaklarına ihtiyaç duymaktadır. Owl tarafından geliştirilen termal görüntüleme sistemi ise herhangi bir aktif enerji kaynağına gereksinim duymamaktadır.

Termal görüntüleme sisteminin performansı oldukça önemlidir. Owl girişimi geliştirilen sistemin; tespit etme, sınıflandırma, hız / mesafe ölçme gibi işlemleri gece ya da gündüz farketmeksizin gerçekleştirebildiğini belirtmektedir.
Owl Termal Görüntüleme Sistemi Bileşenleri
Owl termal görüntüleme sistemi temel olarak üç bileşenden oluşmaktadır:
- Monoküler termal kamera
- Fotonları elektronlara dönüştüren ve sayısallaştıran bir çip
- 3 boyutlu mesafe ölçümü için CNN ile kombine edilmiş, değişken diyaframa sahip lens
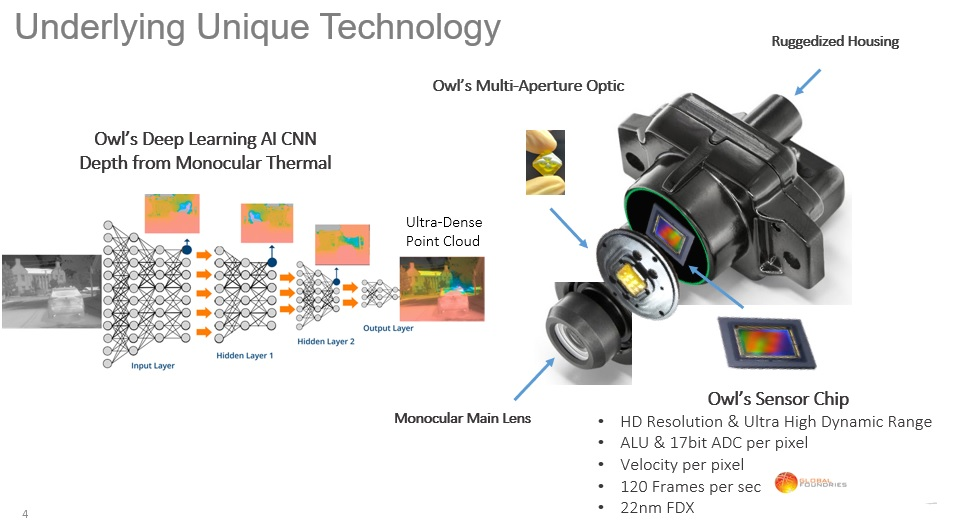
Owl Termal Görüntüleme Sistemi Nasıl Çalışır?
Owl tarafından geliştirilen sistemde görüntünün elde edilmesi için aşağıdaki işlemler sırasıyla uygulanmaktadır:
- Monoküler kameradaki değişken diyaframa sahip lens aracılığıyla aynı görüntünün farklı perspektifleri elde edilir.
- Görüntü işleme teknikleri kullanılarak, her bir kare (frame) için ayrı bir görüntü sentezlenir.
- CNN yardımı ile mesafe ölçümü gerçekleştirilir ve 3 boyutlu termal görüntü oluşturulur.
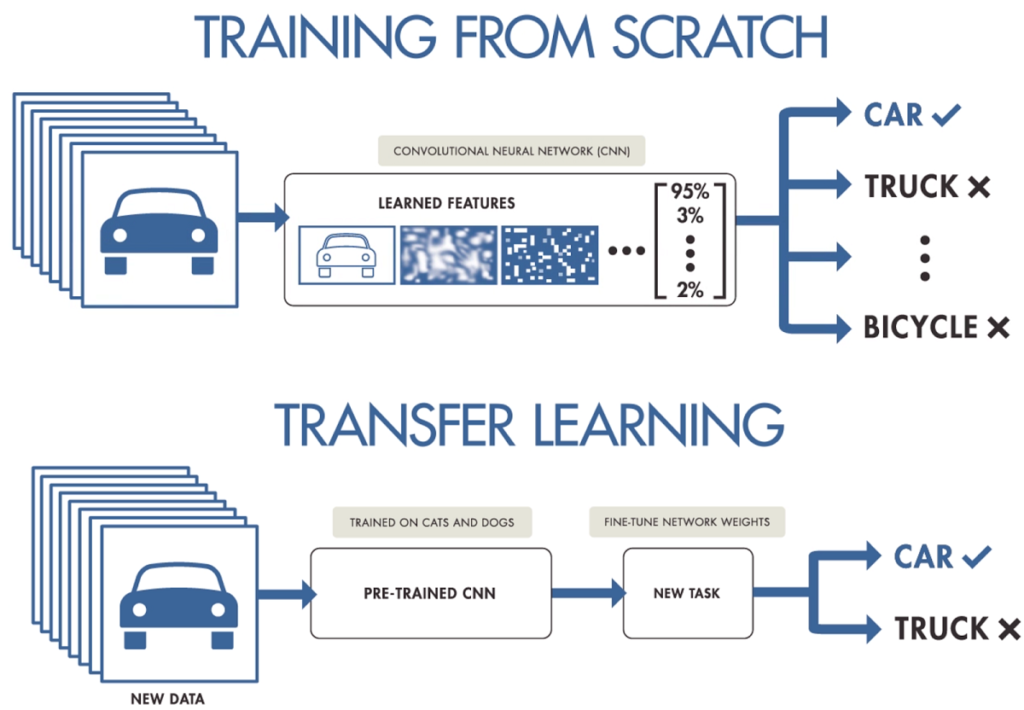
Öte yandan, CNN’i termal görüntüleme sensörlerinden gelen veri kümelerini kullanarak eğitmek yerine, öğrenme aktarımı (transfer learning) yöntemi kullanılmaktadır. Owl girişiminin yaptığı açıklamaya göre, bu yöntem zaman açısından tasarruf sağlamaktadır.
Owl Termal Görüntüleme Sisteminin Performansı
Owl girişimi, termal görüntüleme sisteminin geleceğin otonom araçlarında kullanılmasını planlamaktadır. Ancak girişim, sistemin geleneksel araçlarda da yardımcı sistem olarak kullanılabileceğini belirtmektedir. Bu nedenle sistem geleneksel araçlar üzerinde de denenmektedir. Aşağıda bulunan görseller Owl termal görüntüleme sisteminin gündüz ve gece performansını içermektedir.
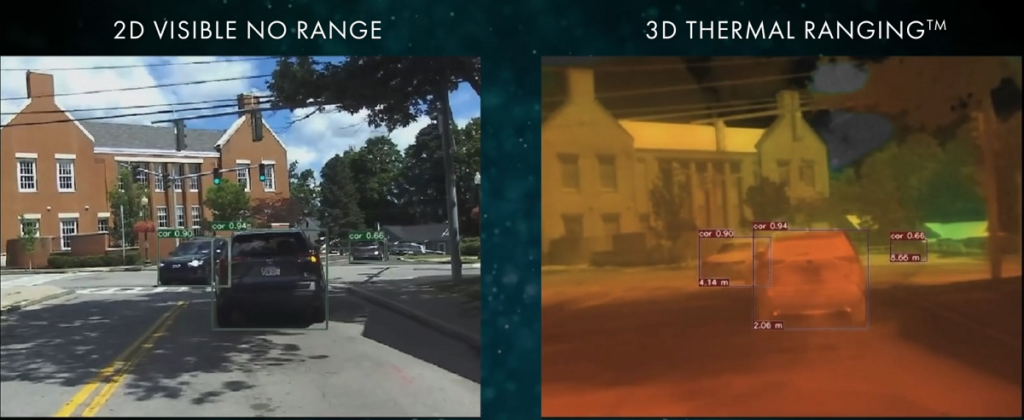
Soldaki görsel, endüstri standartlarına uygun olarak gerçekleştirilmiş, sadece görünür ışığı algılayabilen kamerelar tarafından oluşturulmuş 2 boyutlu görüntülemeyi içermektedir. Standartlara uygun olarak, nesneler sınıflandırma kutuları içerisinde belirtilmektedir.
Sağdaki görsel ise Owl termal görüntüleme sistemi tarafından oluşturulmuş 3 boyutlu görüntülemeyi içermektedir. 2 boyutlu görüntülemeden farklı olarak, sınıflandırma kutusunun sol alt köşesinde ilgili nesnenin mesafesi belirtilmektedir.
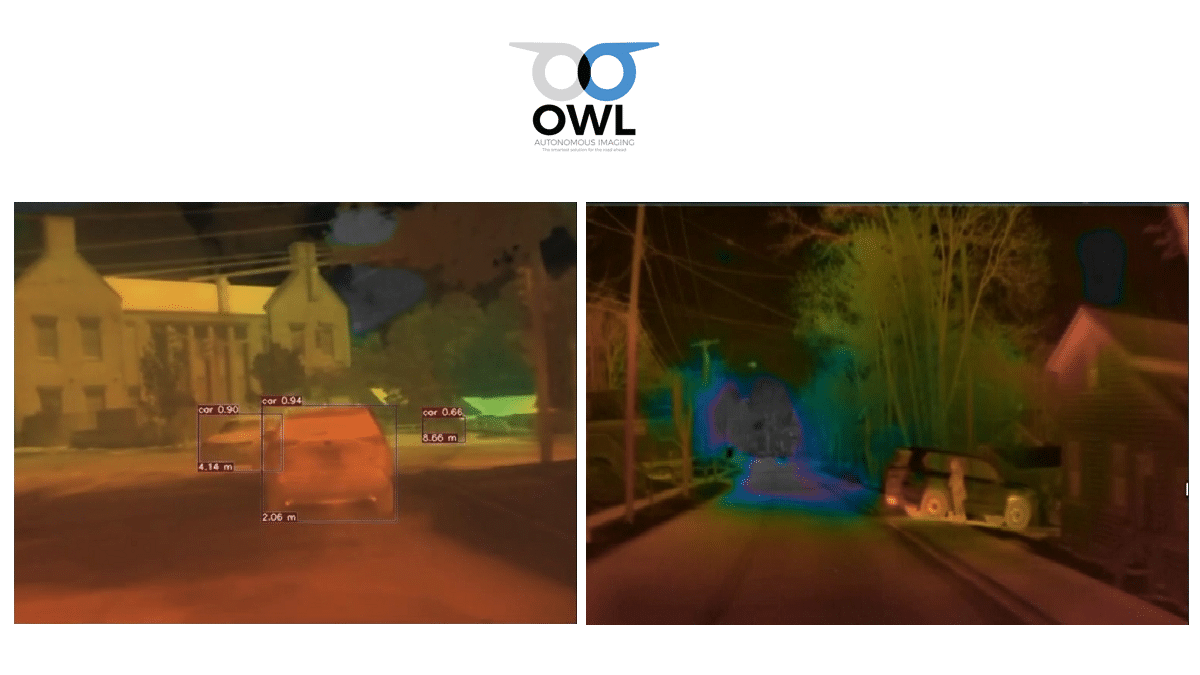
Yukarıda bulunan görseller Owl tarafından geliştirilen sistemin gün ışığı altındaki performansını içermektedir. Ancak girişimin en büyük iddiası, sistemin düşük ışıklı veya karanlık ortamlarda da yüksek perfomans gösterdiğidir. Aşağıdaki görüntüler, sistemin düşük ışık altındaki performansını içermektedir.

Sol tarafta bulunan görseller Owl termal görüntüleme sistemi tarafından oluşturulmuştur. Sağ taraftaki görseller ise 2 boyutlu görüntüleme sistemi tarafından oluşturulmuştur. Termal görüntüleme sistemi tarafından oluşturulan görüntülerde; bisiklet süren insanlar, park halindeki araç ve aracın yanında duran insan net şekilde görülmektedir. 2 boyutlu görüntüleme sistemi tarafından oluşturulan görüntülerde ise bu detaylar bulunmamaktadır.
Termal Görüntüleme ve RADAR Karşılaştırması
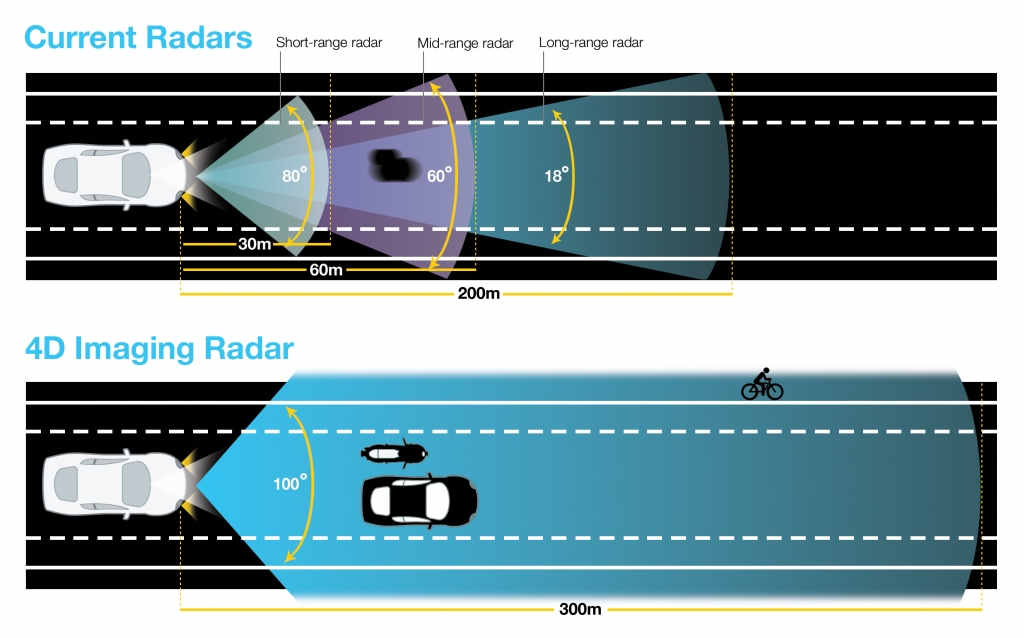
Son zamanlarda yapılan geliştirmelerle birlikte, RADAR’ların otonom araçlarda kullanılması gündeme gelmiştir. Özellikle 4 boyutlu görüntüleme imkanı sunan RADAR’ların otonom araçlarda kullanılması mümkündür. Bununla birlikte RADAR sistemleri, yapısı gereği bazı dezavantajlara sahiptir. Örneğin; RADAR’ın görüş alanına bir aracın ve aracın yanında duran bir insanın girdiği varsayılsın. Doğal olarak araç, insana oranla daha büyük bir alanı kaplamaktadır. RADAR tarafından gönderilen radyo sinyalleri, araçtan ve insandan yansıyıp dönecektir. Buna karşın araç daha büyük bir alanı kapladığından, araçtan yansıyan sinyal miktarı, insandan yansıyan sinyal miktarına oranla çok daha fazladır. Üstelik aracın büyük bir bölümünün metalden yapılmış olması da yansıyan sinyal miktarını artımaktadır. Dolayısıyla RADAR’ın görüş alanında bulunan araç düzgün bir şekilde algılanırken, insanın düzgün şekilde algılanmaması olasıdır. Öte yandan, 3 boyutlu RADAR’lar düşük çözünürlüğe sahip, kısa mesafeli ve gürültülü (görüntü bağlamında) sistemlerdir. 4 boyutlu RADAR sistemlerinin bu sorunları çözmesi beklenmektedir. Ancak 4 boyutlu RADAR’lar henüz geliştirilme aşamasındadır. Termal görüntülemede ise bu sorunların hiçbiri bulunmamaktadır.
Termal Görüntüleme ve LiDAR Karşılaştırması
Termal görüntüleme ve LiDAR arasındaki en büyük fark, LiDAR sistemlerinin uçuş süresi (time of flight) prensibine bağlı olarak çalışmasıdır. LiDAR aracılığıyla mesafe ölçümü yapılırken, bir nesneye lazer ışınları gönderilir ve ışınların nesneden dönüş süresi hesaplanır. Bu işlem sayesinde nesnenin mesafesi yüksek doğrulukta tespit edilir. Owl tarafından geliştirilen termal görüntüleme sistemine yapılan eleştiri ise nesne mesafesinin yaklaşık olarak tespit edildiğidir.
Öte yandan, her iki sistem de nokta bulutu (nokta kümesi) yöntemini kullanmaktadır. Owl girişimi, LiDAR sistemleri tarafından üretilen nokta bulutunun seyrek olduğunu, bu durumun uzak mesafede bulunan küçük nesnelerin algılanmasını ve sınıflandırılmasını güvenilmez hale getirdiğini iddia etmektedir. Owl tarafından geliştirilen termal görüntüleme sisteminin, LiDAR’a oranla 150 kat daha yoğun nokta bulutu ürettiği belirtilmektedir.
Owl Termal Görüntüleme Sisteminin Geleceği
Owl, yakın zamanda kurulmuş bir girişimdir. 15 kişiden oluşan girişim, sektörün öncüleri ile kıyaslandığında oldukça ufak çaplı gözükmektedir. Bununla birlikte, termal görüntüleme sistemlerine yapılan yatırımlar son yıllarda artmıştır. Bu durumu kendi yararına kullanmayı başaran Owl girişimi, kısa sürede yatırımcı bulmayı başarmıştır. Özgün fikirleri ve umut vadeden sistemleri sayesinde Owl girişiminin ilerleyen yıllarda büyümesi olasıdır.
Bununla birlikte, otonom araçlardan üst düzey güvenliğe sahip olmaları beklenmektedir. Düşük ışıklı ortamlarda stereo kameranın algılama mesafesi 40 – 50 metre arasındadır. Bu değer otonom araçlar için oldukça düşüktür. Dolayısıyla düşük ışıklı veya karanlık ortamlarda termal görüntüleme sistemlerinin, 2 boyutlu görüntüleme sistemlerine göre üstün olduğunu söylemek mümkündür. Yapılacak geliştirmelerle birlikte termal görüntüleme sisteminin, tek bir kamera ile 105 – 110 derecelik görüş açısına sahip olması planlanmaktadır. Öte yandan, termal görüntüleme sistemlerinin stereo kameraların yerine geçmesi pek olası değildir. Çünkü otonom araçların, birçok sistemin birlikte çalışması ile hareket eden araçlar olması beklenmektedir. Dolayısıyla termal görüntüleme sistemlerinin, otonom araçlarda görüntüleme işlemi için yardımcı bir sistem olması öngörülmektedir.



